

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

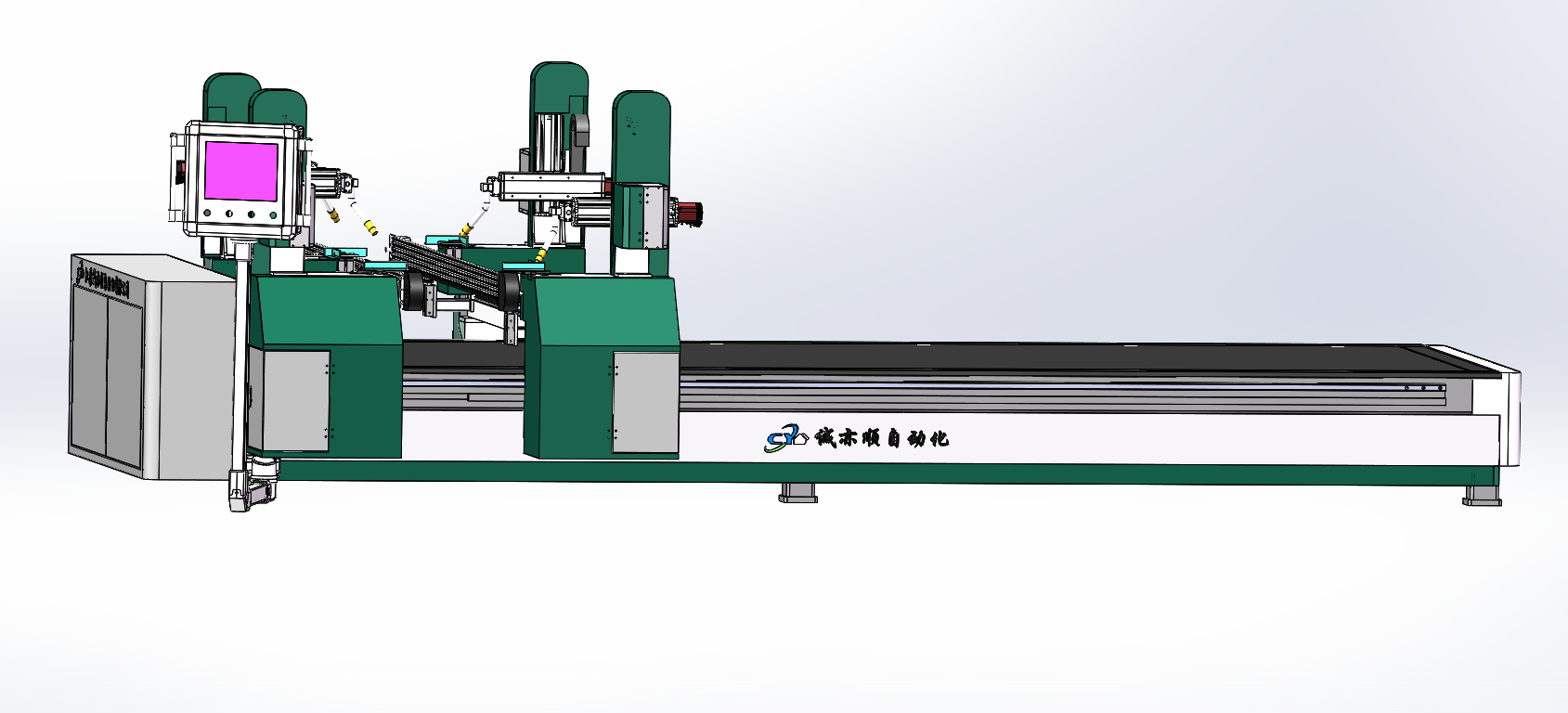
助力臂机械手原理具体控制流程为:厂房空气经过气源处理模块处理后,分成1组动力气路和3组信号气路。动动气路依次通过单向阀、气控减压阀动力端口后,向标准气缸提供动力气源;一组信号气路依次通过手动液压换向阀和气控液压换向阀,助力臂机械手原理对来自负载气控平衡阀的负载信号进行通断选择控制;二组信号气路依次通过负载气控平衡阀和气控液压换向阀,为汽动液压换向阀提供负载信号;第三组信号气路依次通过控制气控平衡阀和或门,与来自气控液压换向阀的信号进行逻辑或处理。3组信号经换向选择和逻辑或处理后,为下一个或提供空载或负载信号,与来自标准气缸端的反馈气压信号进行逻辑或处理,将逻辑或信号输入给主气控平衡阀,使主气控平衡阀的输出动与标准气缸励相等,使机械手达到平衡。

助力臂机械手原理于助力机械手具有省事,幼的特点,被广泛应用于现代工业中的各个行业领域,如:大型物料的移载,搬运,大型设备的定位、装配等场合,总之,在现代生产中,无论原料的接受还是半成品的加工、产、配送等环节,气动机械手都发挥着不可替代的作用。助力机械手设备当处于最短的等效力臂的情况平衡使用性能调节校正阶段的平衡信号气体压力,助力臂机械手原理为助力机械手负载端臂在全部区域内部可以完成平衡的最小气体压力,负载端臂在其他区域的反馈气体压力通常均大于该基准的信号气体压力。
一、给出的時间应超过电动式和液压机构件的实行時间;二、助力臂机械手原理伸缩运动的速度要大于回转运动的速度,因为回转运动的惯性一般大于伸缩运动的惯性。在满足工作拍节要求的条件下,应尽量选取较底的运动速度。助力机械手的运动速度与臂力、行程、驱动方式、缓冲方式、定位方式都有很大关系,助力臂机械手原理应根据具体情况加以确定;三、在工作时间短、动作多的情况下,往往同时进行多种动作,因此驱动系统应采取相应措施,保证动作的同步。
1.助力臂机械手原理机床加工工件的装卸,特别是在自动化机床,组合机床上使用较为普遍。2.在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械制造业中它可以用来组装零部件。3.可在劳动条件差,单调重复易疲劳的工作环境工作,以代替认的劳动。4.助力臂机械手原理可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。5.宇宙及海洋的开发。6.军事工程及生物医学方面的研究和实验。

一、气动助力机械手指示灯变换正常,压励机不能作业解决方法:输出接点间的妥当管熔断,替换同标准妥当管,W型,S型控制器在面板上,N型,Z型控制器在线路板上,标准控制器内继电器触点老化,助力臂机械手原理替换两个同类型的继电器。二、气动助力机械手不作业,一切指示灯均不亮解决方法电源妥当管断路:替换同标准妥当管,W型,S型控制器在面板上,助力臂机械手原理标准:5*20/0.5A:N型,Z型控制器在线路板上,毛病扫除后主动康复。

在自动化流水线自动控制概念中,通过模拟机械手臂的运动控制,更倾向于采用速率控制输入的模型,而不是力矩控制输入的模型。这一选择的关键缘故以下:助力臂机械手原理运动学模型比动力学模型更简单。特别的,不需要引入大量的矩阵制的方程,这些方程的确定要依赖于大量的关于结构质量等参数,助力臂机械手原理对于许多自动化流水线应用来说,我们没有必要正确知道所有这些量的具体数值。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



