

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

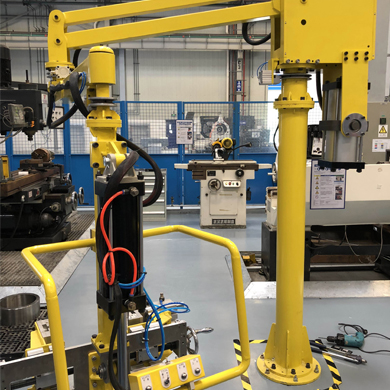
气动助力机械手主体结构分三个主回转关节,可分别绕自身轴线作360度自由回转,中每个关节上均装有制动装置,,可依据实际需要在任意位置制动。助力臂机械手原理大臂部分为四连杆结构由气缸驱动实现机械手上下运动,结合三个主关节的回转实现工件的灵活进行搬运或装配。夹具结构可依据工件的不同采用不同的非标设计,助力臂机械手原理为发动机缸体生产加工行业对缸体上加工中心用进行搬运助力机械手,于需要工件上加工中心前后对态在机械手上开展调整,需要对工件开展平面回转,360度翻转及夹紧等动作,在夹具非标设计上较为复杂,并在设计细节及精度上提出很高要求。
助力臂机械手原理随着互联网技术和大数据技术的发展,助力机械手的应用范围必将得到进一步的延伸:一、在国内主要是逐步扩大应用范围,重点发展铸造、热处理方面的助力机械手;二、助力臂机械手原理发展通用助力机械手,有条件的还要研制示教式机械手、计算机控制机械手和组合机械手等;三、提高助力机械手的反应速度,减少冲击,正确性定位;四、大力研究伺服型、记忆再现型,以及具有触觉、视觉效果等性能的助力机械手,并考虑与计算机连用。五、研制具有某种智能的助力机械手,使助力机械手具有一定的传感能力,具賄视觉效果功能和触觉功能。六、目前世界精致工业助力机械手均有高精化、高速化、多轴化和轻量化的发展趋势。定位精度可以满足微米及亚微米级要求,将助力机械手、柔性制造系统和柔性制造元相结合,从而根本改变目前机械设备制造系统的人工操作状态。七、随着助力机械手的小型化和微型化,应用领域将会突破传统的机械设备领域,向着电子信息、生物技术、生命科学及航空航天等精致行业发展。
助力臂机械手原理当吸盘发生持续损坏时,项目组立即分析原因,要求设备制造商改换吸盘;其次,设备制造商改换吸盘后,吸盘仍然出现磨损现象,因此,我们要求增加吸盘的保护罩。但保护罩仍不能消除吸盘损坏的情况,然后我们仔细观察了工的操控。助力臂机械手原理原来员工在设备进行操控时,根本没有按照正确的操控要求进行,也许是为了考虑节省时间,即没有利用好夹具导向的作用,导致每次吸盘被锋利板材划伤的几率大增。在放置完板材后,没有及时将夹具移出拼台,导致吸盘增加了在拼台上被划伤的机会。因此,即规范员工操控、增加吸盘保护装置、使用低成本吸盘,由此,此吸盘容易损坏的问题得到了较好地解决。通过以上案例可以看出,员I的操控,也是影响助力机械臂的设计和使用过程中需要注意的事项。

助力臂机械手原理具体控制流程为:厂房空气经过气源处理模块处理后,分成1组动力气路和3组信号气路。动动气路依次通过单向阀、气控减压阀动力端口后,向标准气缸提供动力气源;一组信号气路依次通过手动液压换向阀和气控液压换向阀,助力臂机械手原理对来自负载气控平衡阀的负载信号进行通断选择控制;二组信号气路依次通过负载气控平衡阀和气控液压换向阀,为汽动液压换向阀提供负载信号;第三组信号气路依次通过控制气控平衡阀和或门,与来自气控液压换向阀的信号进行逻辑或处理。3组信号经换向选择和逻辑或处理后,为下一个或提供空载或负载信号,与来自标准气缸端的反馈气压信号进行逻辑或处理,将逻辑或信号输入给主气控平衡阀,使主气控平衡阀的输出动与标准气缸励相等,使机械手达到平衡。

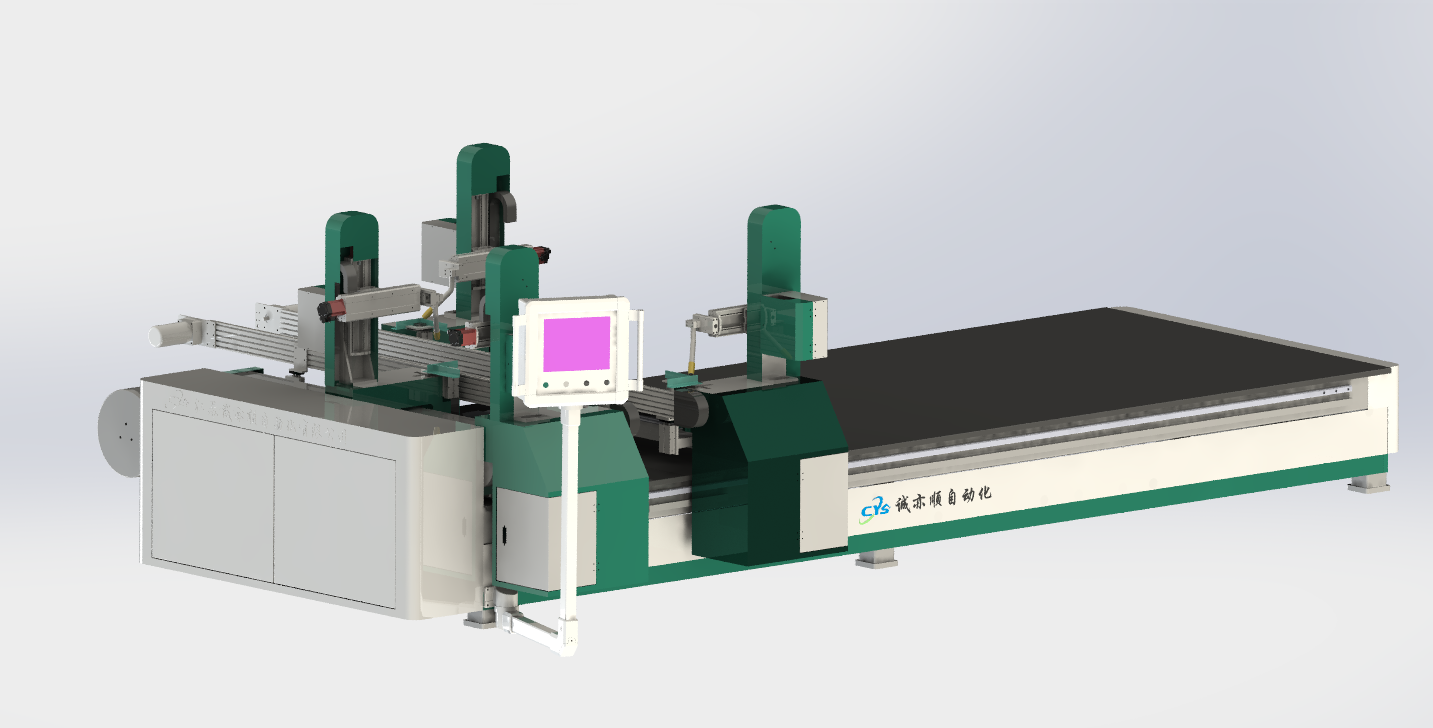
1,助力臂机械手原理支持各种角铁类型。2、只需输入角铁下料尺寸即可,无需示教,无需编程使用更方便。3,焊接范围240*240到1500*3500根据角铁参数自动定位。4、助力臂机械手原理控制系统经过严格多项可靠性测试,如EFT(电快速瞬变/脉冲群)、EMC(电磁兼容性)、ESD(静电放电测试)、高低温震动、跌落等。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



