

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

1.不需要,人工进行操作的通用型。它是一种独立的不附属于某一主机的装置。智能助力机械手原理它可以根据任务的需要程序编制,以完成各项规定的进行操作。2.需要人工才做的,成为操作机。它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电讯号操作机来进行探测月球等。工业中采用的锻造操作机也属于这一范围。3.智能助力机械手原理专用型,主要附属于自动机床或自动化流水线上,用以解决机床上下料和工件传送,这类产品在国外为“MechanicalHand”它是为主机服务的,由主机驱动;除少数外,工作程序一般是固定的,因此是专用的。
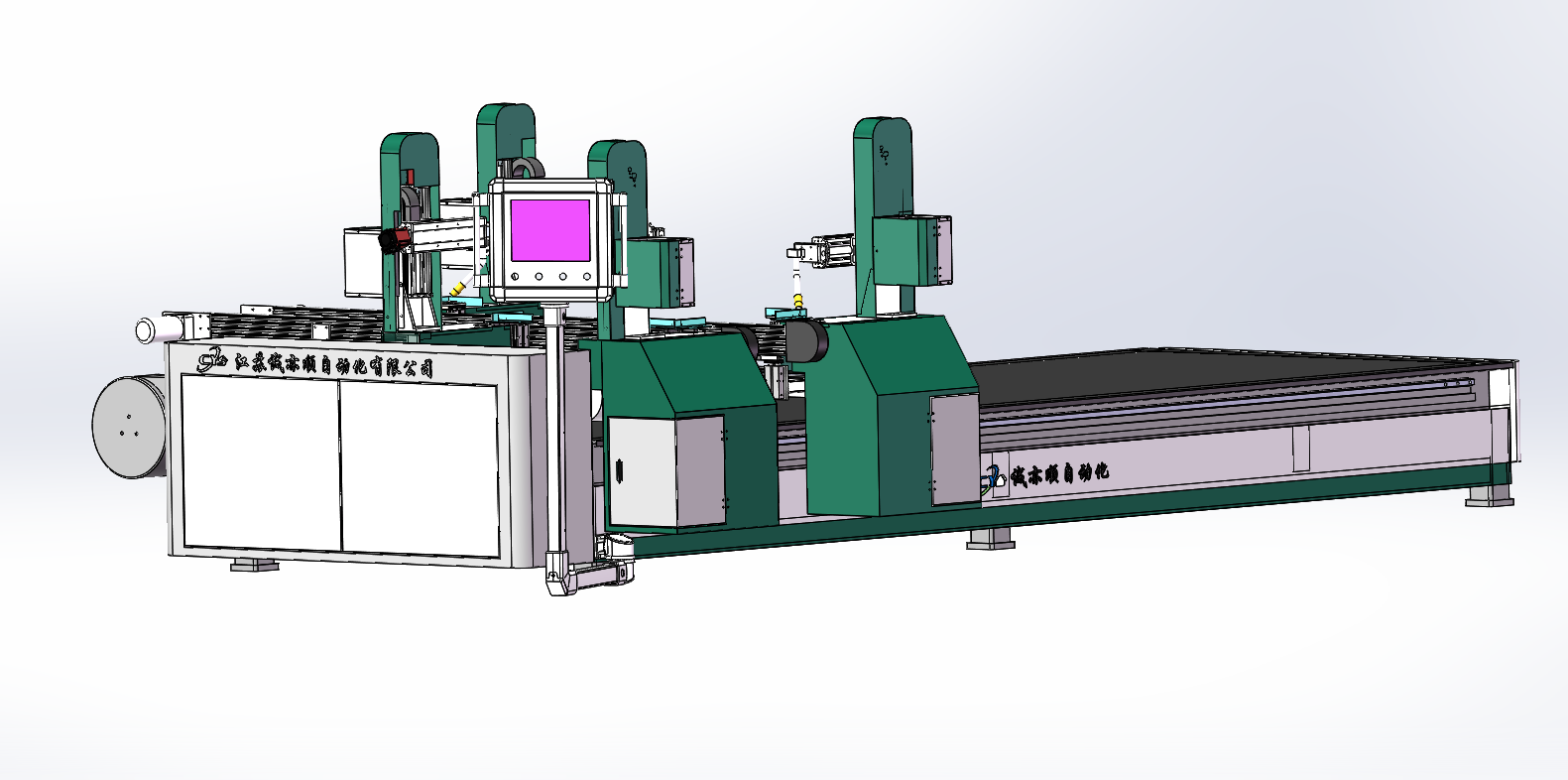
智能助力机械手原理于助力机械手具有省事,幼的特点,被广泛应用于现代工业中的各个行业领域,如:大型物料的移载,搬运,大型设备的定位、装配等场合,总之,在现代生产中,无论原料的接受还是半成品的加工、产、配送等环节,气动机械手都发挥着不可替代的作用。助力机械手设备当处于最短的等效力臂的情况平衡使用性能调节校正阶段的平衡信号气体压力,智能助力机械手原理为助力机械手负载端臂在全部区域内部可以完成平衡的最小气体压力,负载端臂在其他区域的反馈气体压力通常均大于该基准的信号气体压力。
智能助力机械手原理在实际的自动化流水线生产中,驱动机器人的电机,常常被供以低水平的速率控制环路,这种环路需要预先设定的角速度作为参考输入,并且稳定电机的角速度到这个值上。如果这个调节环路非常有效,那么自动化流水线设备设定速率值和实际速率之间的差将会很小,智能助力机械手原理即使是在设定速率值和电机的负载连续变化的时候(至少在一定范围内)。也可以相反过来让我们把设定速率看做一个自由控制变量,很多工业上应用的机械手臂的配套控制器都是基于这一原理。

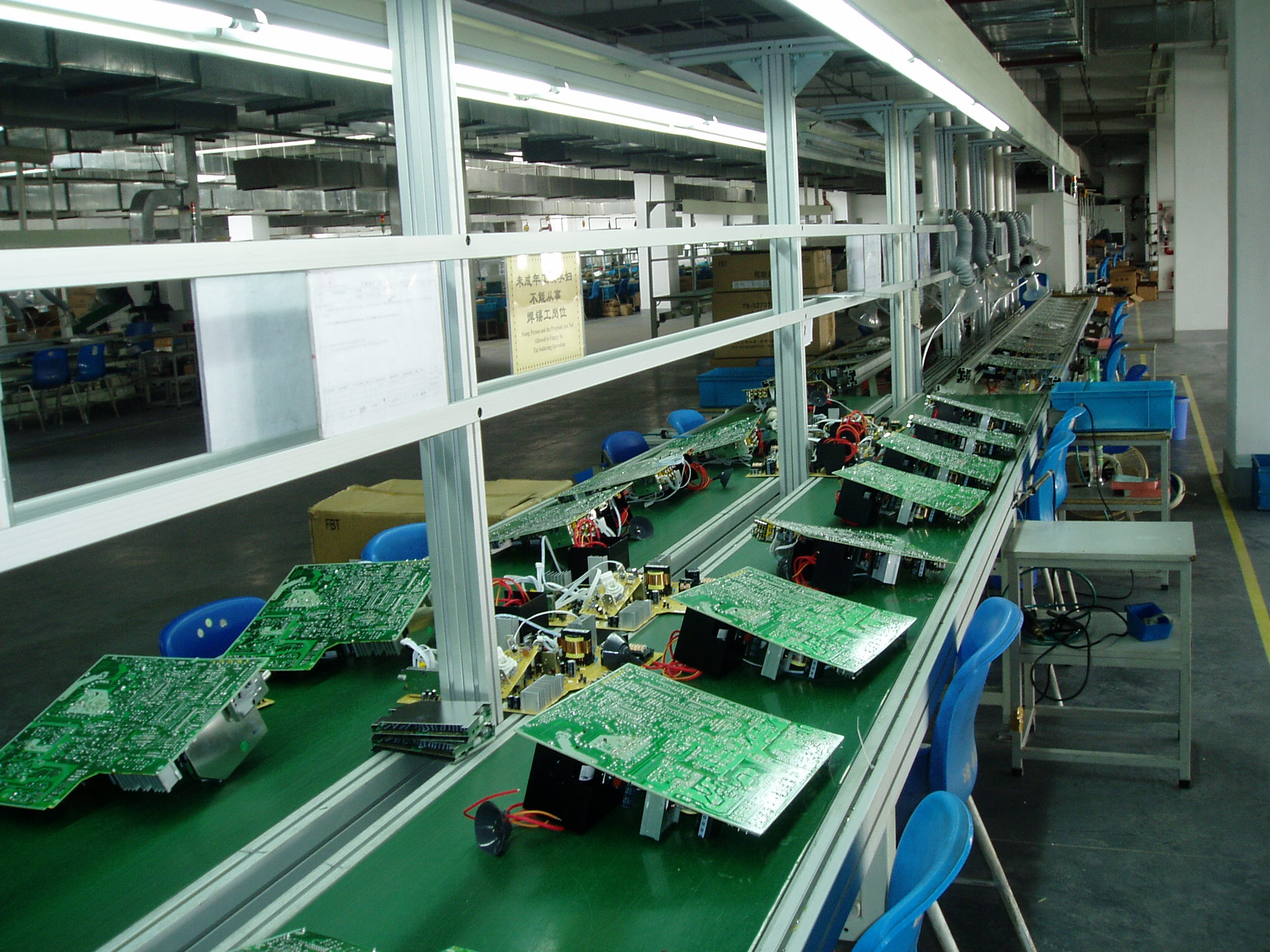
1.智能助力机械手原理机床加工工件的装卸,特别是在自动化机床,组合机床上使用较为普遍。2.在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械制造业中它可以用来组装零部件。3.可在劳动条件差,单调重复易疲劳的工作环境工作,以代替认的劳动。4.智能助力机械手原理可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。5.宇宙及海洋的开发。6.军事工程及生物医学方面的研究和实验。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



