联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
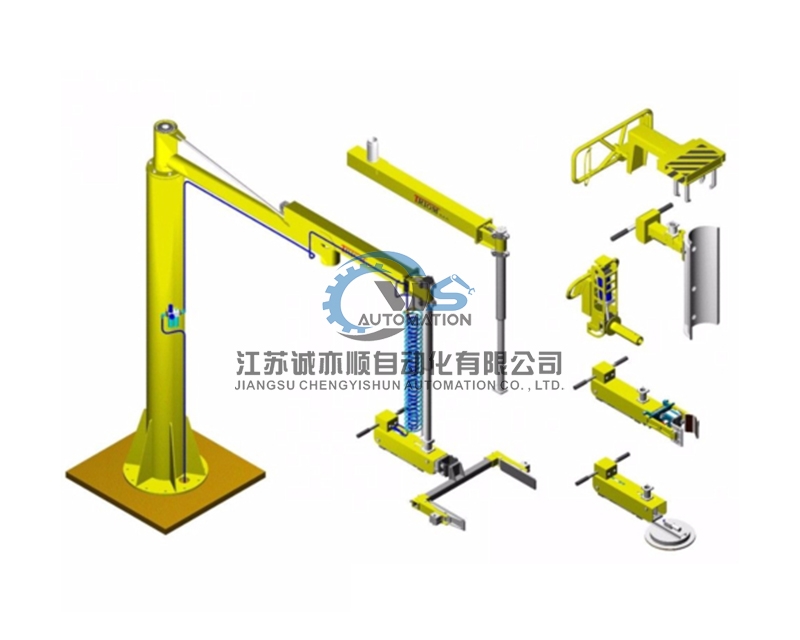
工厂在流水线作业中引入气动助力机械手时,如何根据搬运物料的重量与尺寸选择适配型号?
工厂流水线引入气动助力机械手时,核心选型逻辑是让机械手的额定负载、工作范围等核心参数与物料重量、尺寸精准匹配,同时兼顾流水线节拍、作业姿态等工况,确保搬运稳定。以下结合物料核心特性,详细说明选型方法。
选型时需以物料实际重量为基础,预留 1.3-1.5 倍的安全冗余,避免长期满负荷运行导致设备损耗。轻型物料(≤5kg)可选用迷你型气动机械手,其机身轻便、响应速度快,适配电子元件、小型零部件等搬运场景;中型物料(5-30kg)适配标准型气动助力机械手,额定负载需覆盖物料重量与夹具重量之和,兼顾灵活性与承载能力;重型物料(30-100kg)需选用重载型机械手,配备强化气缸、加厚臂架,部分场景需搭配平衡阀或增压装置,确保启停平稳;超重型物料(>100kg)则需定制专用重载气动机械手,或采用多气缸联动结构,同时强化机身支撑强度。
轻型物料搬运可选用单气缸驱动的机械手,气压调节至 0.4-0.6MPa 即可满足需求;中重型物料需采用双气缸或多级气缸驱动,气压提升至 0.6-0.8MPa,保障动力充足。同时需关注机械手的制动系统,重载场景优先选择带机械自锁功能的型号,防止突发断气导致物料坠落;频繁启停的流水线,需选用缓冲性能好的气缸,减少重量冲击对设备和物料的影响。
物料尺寸直接决定机械手的工作半径和臂长。小型物料(长宽高均≤30cm)可选用短臂型机械手,工作半径 50-80cm,适配近距离精准搬运;中型物料(30cm<z大尺寸≤80cm)需选用标准臂长机械手,工作半径 80-150cm,确保物料能覆盖流水线上下料工位;大型物料(z大尺寸>80cm)需选用长臂或伸缩臂型机械手,工作半径 150-300cm,部分场景可搭配旋转关节,提升横向覆盖范围。同时需核对物料摆放方式,堆叠式物料需考虑机械手的垂直升降行程,确保能跨越物料高度完成抓取。
扁平状物料(如板材、面板)需选用真空吸盘式夹具,根据物料尺寸确定吸盘数量和排列方式,确保吸附面积充足,避免滑落;不规则形状物料(如机械零件、组件)需选用机械夹爪式夹具,夹爪开合范围需大于物料z大尺寸,同时配备防滑衬垫,提升抓取稳定性;细长型物料(如管材、棒材)需选用两点或三点支撑式夹具,防止搬运过程中弯曲变形,必要时搭配侧压辅助装置。此外,物料尺寸过大时,需选用可调节夹具,适配不同规格物料的通用搬运需求。
流水线节拍快(单次搬运时间<5 秒)的场景,需选用高速响应型气动机械手,优化气缸进气排气通道,减少动作延迟;多工位搬运场景需选择多关节或旋转型机械手,确保在物料尺寸和重量范围内,灵活切换作业位置。同时需考虑流水线布局,直线型流水线可选用直角坐标式机械手,空间受限场景优先选择折叠臂型,提升空间利用率。
重型或大尺寸物料搬运,需选用带过载保护的型号,当负载超出额定值时自动停机报警;腐蚀性环境中的物料,需选择不锈钢材质或防腐涂层的机械手,避免部件锈蚀影响使用寿命。此外,需核对机械手的重复定位精度,精密零部件搬运要求重复定位误差≤±0.1mm,普通物料可放宽至 ±0.5mm,确保与流水线工位精准对接。
若流水线需搬运多种重量和尺寸的物料,优先选择模块化设计的机械手,可通过更换夹具、调整臂长或升级气缸,实现多场景适配。同时需考虑后期产能扩张,预留一定的负载和范围冗余,避免频繁更换设备。所有选型需符合工业安全标准,确保机械手的运行速度、制动性能等参数与物料特性匹配,降低作业风险。


地址:江苏省盐城市亭湖区新园路95号1号

微信公众号