联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
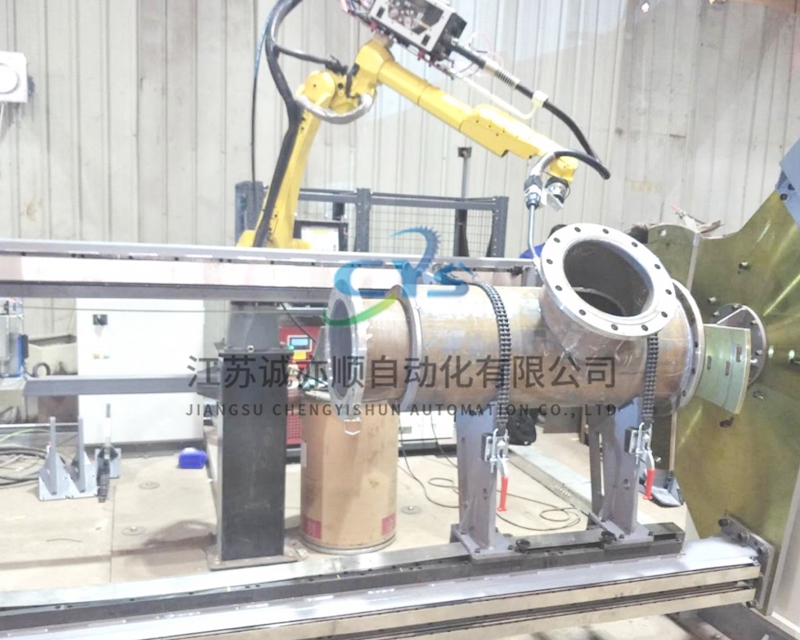
工业车间助力机械手如何选型,才能匹配不同工件的搬运需求?
工业车间助力机械手选型:匹配不同工件搬运需求的方法
助力机械手(又称省力机械手、平衡吊)的核心作用是替代人工完成重物搬运、精准定位,选型的关键在于匹配工件特性、车间工况及搬运动作要求,避免出现 “过载无力” 或 “大材小用” 的情况。以下是针对性的选型步骤和要点:
一、 明确核心选型参数:基于工件与搬运需求
选型的第1步是梳理工件和搬运场景的关键数据,这是所有选型决策的依据。
工件重量与尺寸
额定载荷:机械手的额定载荷需≥工件重量 + 夹具重量,同时预留 10%~20% 的安全余量。例如搬运 20kg 的零部件 + 5kg 的夹具,需选择额定载荷≥28~30kg 的机械手。
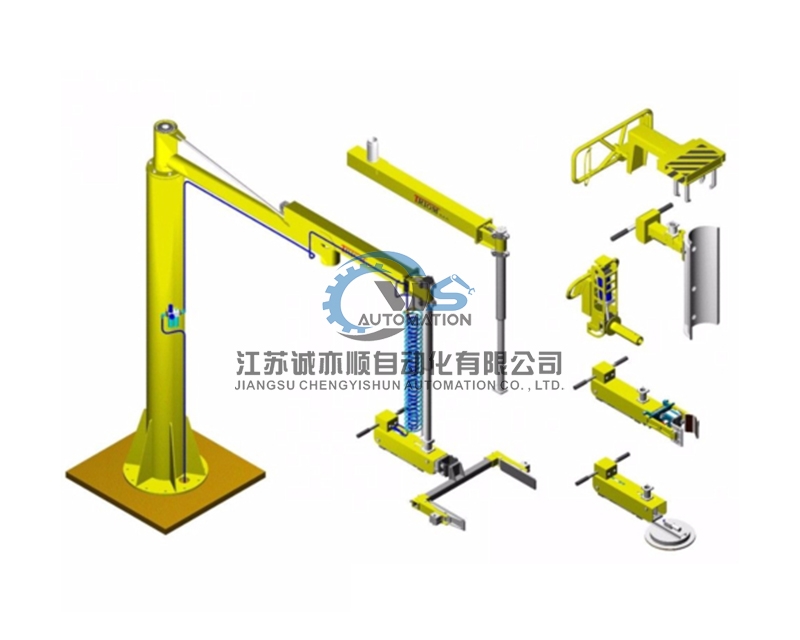
工件尺寸与重心:长条形工件(如管材、型材)需关注机械手的夹持跨度和重心偏移范围;不规则工件需选配可调节夹具,避免搬运时重心失衡。
工件材质:光滑表面工件(如钣金件、玻璃)需选用真空吸盘夹具;粗糙或多孔工件(如铸件、木箱)优先用气动夹爪或吊钩。
搬运轨迹与作业半径
作业半径:测量车间内工件的 “取料点” 与 “放料点” 之间的水平 / 垂直距离,确保机械手的作业半径覆盖全程,同时预留 500~1000mm 的活动余量,避免碰撞设备。
升降高度:根据车间层高、工件搬运的垂直行程(如从地面到机床工作台),确定机械手的z大升降高度,优先选择行程可调的型号。
动作复杂度:仅需 “上下搬运 + 水平平移” 的简单工况,选择基础型硬臂式机械手;需多角度翻转、精准定位的工况(如装配工序),选择关节型或伺服驱动助力机械手。
车间环境条件
洁净度要求:无尘车间(如电子、医药)需选用不锈钢材质机械手,搭配防尘夹具,避免油污或粉尘污染工件;
腐蚀性环境:化工车间需选用防腐蚀涂层的机械手,夹具优先用塑料或不锈钢材质;
防爆要求:易燃易爆车间(如油漆车间、油气加工)需选择防爆型助力机械手,电机、气动元件需符合防爆等级(如 Ex d ⅡB T4)。


地址:江苏省盐城市亭湖区新园路95号1号

微信公众号